
Belt-CP prêt à décoller.
C'est un hélicoptère à pas collectif, c'est-à-dire que l'incidence (l'angle)
des pales est ajustée constamment par un plateau tournant (plateau cyclique).
C'est un mécanisme complexe qui permet un contrôle parfait de l'hélicoptère.
Le rotor arrière (anti-couple) est entraîné par une courroie. L'incidence des
pales de ce rotor est ajustée par un servo qui lui-même est contrôlé par un
gyroscope. Cet ensemble permet de stabiliser les rotations générées soit par le
couple engendré par le rotor principal, pour éviter que l'hélicoptère ne tourne
sur lui-même ou après une sollicitation par le pilote.
Le rotor qui à une envergure de 68cm est à mon avis le minimum nécessaire pour
pouvoir le maîtriser à-peu-près dès le départ.
Je ne le conseille pas pour un débutant seul. Il est fortement conseillé de
commencer ce genre d'hélico avec un peu d'expérience ou alors avec l'aide d'un
autre pilote.
20.12.2007
Premier hélicoptère à pas collectif, l'Esky Belt-CP.
Je continue mes entraînements en chambre et ce jour de décembre une
seule fois à l’extérieur –là j’ai beaucoup de place- mais ça s’est soldé par un
"arbrissage" (c'est nouveau: un atterrissage dans un arbre) sans gros dégâts. Je persévère et compte
bien voler à l’extérieur d’ici l’été.
En attendant des jours meilleurs je tiens à maitriser le stationnaire dans tous
les sens et l'entraînement est quotidien.
Belt-CP prêt à décoller.
Je me suis décidé à faire le pas mi-décembre pour un hélico qui ressemble à un
hélico. J’ai donc choisi un Esky Belt-CP en RTF.
C'est un hélicoptère avec un rotor à pas collectif (CP) et un rotor anti couple
(AC) de queue , comme les vrais.
Il a un rotor de 680mm, suffisamment grand pour donner un minimum de stabilité.
Plus petit c'est trop nerveux, plus gros c'est trop cher en pièces pour un
débutant.
10.02.2008
Il fait beau et il y a peu de vent. C'est la première fois que le Belt-CP
sort sans son kit d'apprentissage (la croix de sécurité sous l'appareil).
Voici la vidéo de cet instant magique:
Première sortie du Belt sans la croix
d'apprentissage
Ca change de la chambre et ce large espace mis soudain à ma disposition permet
de mieux appréhender les mouvements de l'hélico. La confiance gagne
La radio livrée d'origine est en 72MHz, mode 2 (gaz à gauche).
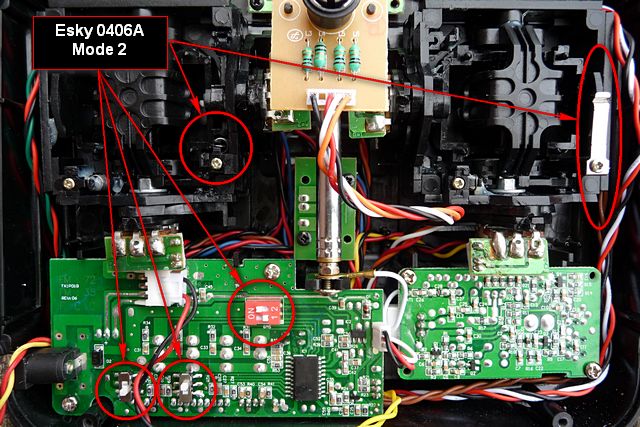
Les deux commutateurs blancs à gauche
permettent de passer du mode 1 (haut/bas) au mode 2 (bas/haut).
Le ressort de centrage est sur la manette droite, la languette de freinage de la manette des gaz est ici sur la manette gauche (mode
2).

Branchements des éléments sur le récepteur Esky
1 - Servo gauche
2 - Servo avant
3 - ESC ek1-0350 (Moteur)
4 - Servo AC (Anti couple)
5 - Libre
6 - Servo droit
7 - Libre
La différence avec la radio d'origine Esky 0406A est flagrante. Tout est ajustable et intuitif.
On trouve facilement
le réglage désiré.
Elle est livrée avec le récepteur R617FS.
Voici les branchements des différents éléments sur le récepteur:
1 - Servo droit (Ailerons) Esky EK2-0508
2 - Servo avant (Elevator) Esky EK2-0508
3 - ESC (Moteur) FlyFun 30A(B)
4 - Servo AC (Anticouple) Align-DS420 (Gyro Align GP750)
5 - Sensibilité gyroscope
6 - Servo gauche (Pitch) Esky EK2-0508
7 - Libre
Les réglages suivants de la T7C correspondent à ce que j'utilise à la base.
|
TX SETTINGS |
|||||||||||
|
MODE |
|
2 |
|||||||||
|
THR-REV |
NOR |
||||||||||
|
LANGUAG |
ENGL |
||||||||||
|
MENU 1 |
MENU 2 |
MENU 2 |
|||||||||
|
Title |
Position |
Option |
Value |
|
Title |
Position |
Value |
|
Title |
Position |
Value |
|
TH-CRV(N) |
TH-CRV(1) |
1 |
TH-CRV(2) |
2 |
|||||||
|
P5> |
95% |
P5> |
95% |
P5 |
100% |
||||||
|
P4> |
85% |
P4> |
87.5% |
P4 |
95% |
||||||
|
P3> |
65% |
P3> |
80% |
P3 |
90% |
||||||
|
P2> |
32.5% |
P2> |
87.5% |
P2 |
95% |
||||||
|
P1> |
0% |
P1> |
95% |
P1 |
100% |
||||||
|
PI-CRV(N) |
N |
PI-CRV(1) |
1 |
PI-CRV(2) |
2 |
||||||
|
P5> |
90% |
P5> |
95% |
P5 |
100% |
||||||
|
P4> |
75% |
P4> |
72.5% |
P4 |
75% |
||||||
|
P3> |
60% |
P3> |
50% |
P3 |
50% |
||||||
|
P2> |
45% |
P2> |
27.5% |
P2 |
25% |
||||||
|
P1> |
30% |
P1> |
5% |
P1 |
0% |
||||||
|
REVO-MIX |
REVO-MIX |
||||||||||
|
REVO |
INH |
REVO |
INH |
||||||||
|
D/R,EXP |
|
|
SW>D |
GYRO |
SW>G |
||||||
|
CH>1-AIL |
DN |
D/R |
100% |
UP |
N |
30% |
|||||
|
EXP> |
-20% |
DN |
A |
30% |
|||||||
|
CH>2-ELE |
DN |
D/R |
100% |
||||||||
|
EXP> |
-20% |
HOV-THR |
INH |
||||||||
|
CH>4-RUD |
DN |
D/R |
100% |
||||||||
|
EXP> |
0% |
HOV-PIT |
ON |
||||||||
|
RT |
H |
0% |
|||||||||
|
E.POINT |
VR |
ON |
|||||||||
|
CH-1 |
100%-100% |
MD |
NORML |
||||||||
|
CH-2 |
100%-100% |
||||||||||
|
CH-3 |
100%-100% |
TH-HOLD |
INH |
||||||||
|
CH-4 |
100%-100% |
||||||||||
|
CH-5 |
100%-100% |
OFFSET |
|||||||||
|
CH-6 |
100%-100% |
OFFSET |
INH |
||||||||
|
CH-7 |
100%-100% |
||||||||||
|
GOVERNOR |
|||||||||||
|
SUB-TRIM |
MIX |
INH |
|||||||||
|
CH-1 |
AILE |
-100 |
|||||||||
|
CH-2 |
ELEV |
-100 |
SWASH->THR |
||||||||
|
CH-3 |
THRO |
0 |
MIX |
INH |
|||||||
|
CH-4 |
RUDD |
0 |
|||||||||
|
CH-5 |
GYRO |
0 |
P-MIX1 |
INH |
|||||||
|
CH-6 |
PITC |
0 |
|||||||||
|
CH-7 |
AUX1 |
0 |
P-MIX2 |
INH |
|||||||
|
TRIM |
P-MIX3 |
INH |
|||||||||
|
CH-1 |
04 |
||||||||||
|
CH-2 |
04 |
||||||||||
|
CH-3 |
04 |
||||||||||
|
CH-4 |
04 |
||||||||||
|
REVERSE |
|||||||||||
|
CH-1 |
REV |
||||||||||
|
CH-2 |
NOR |
||||||||||
|
CH-3 |
REV |
||||||||||
|
CH-4 |
REV |
||||||||||
|
CH-5 |
NOR |
||||||||||
|
CH-6 |
NOR |
||||||||||
|
CH-7 |
NOR |
||||||||||
|
SWASH |
(HR3) |
||||||||||
|
AIL |
-60% |
||||||||||
|
ELE |
+70% |
||||||||||
|
PIT |
-60% |
||||||||||
|
FAIL SAFE |
|||||||||||
|
F/S |
. |
||||||||||
|
CH: |
3 |
||||||||||
|
NOR |
|||||||||||
|
PARA |
|||||||||||
|
RESET |
EXEC. |
||||||||||
|
TYPE |
HR3 |
||||||||||
|
CH5-SW |
- |
||||||||||
|
CH7-SW |
- |
||||||||||
|
TIMER |
OFF |
||||||||||
|
TIME |
09:00 |
||||||||||
|
MODE |
DOWN |
||||||||||
|
SW |
A |
||||||||||
|
TRAINER |
|||||||||||
|
TRAINER |
INH |
||||||||||
Le gyro GP750 est réglé de la façon suivante:
26 avril 2008
Je suis en avance sur le programme que je me suis fixé. Je maîtrise le
Belt-CP assez bien ce qui me permet d'évoluer assez sereinement si la place est
suffisante.
Les vols rapides et les stationnaires de face ne posent pas de problème et je
commence à faire des loopings et des tonneaux.
J'ai la chance d'habiter en campagne et la place pour faire évoluer l'hélico ne
manque pas. Il y a néanmoins la plupart du temps du vent que je doit
maîtriser...
Evidemment ça ne va pas toujours comme je veux.
J'ai eu un certain nombre de casses plus ou moins conséquentes. J'apprends
beaucoup de mes erreurs et cela me donne l'occasion de bien connaître les
manipulations nécessaires pour un bon réglage.
Certaines pièces ont été changées soit pour améliorer son comportement soit pour
l'enjoliver. J'ai ainsi remplacé des pièces du rotor en plastique par des pièces
en aluminium.
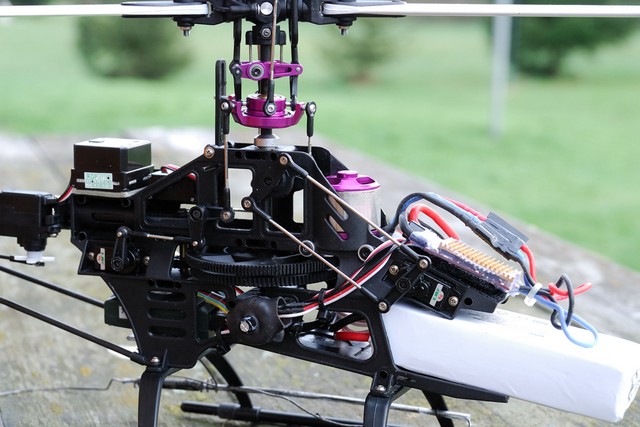
Le contrôleur est placé sur le dessus. Le gyroscope est un Futaba GY401, le
servo associé un Futaba digital S3153. Quelques pièces du rotor sont en
aluminium éloxé.
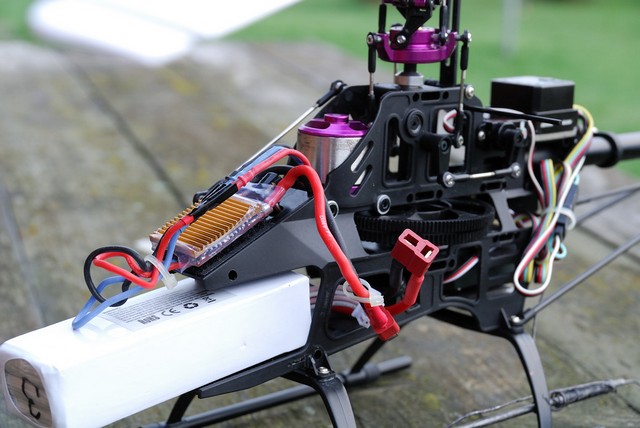
Je place l'accumulateur de cette façon pour un meilleur équilibre.
Le châssis à souffert et j'ai fini par remplacer celui d'origine par le kit
en carbone du plus bel effet, mais pas plus résistant au crash...
C'est dans l'euphorie des meilleurs jours que je prends quelques risques qui
sont immédiatement sanctionnés par de la casse.
Voici ce qui reste après un gros crash.
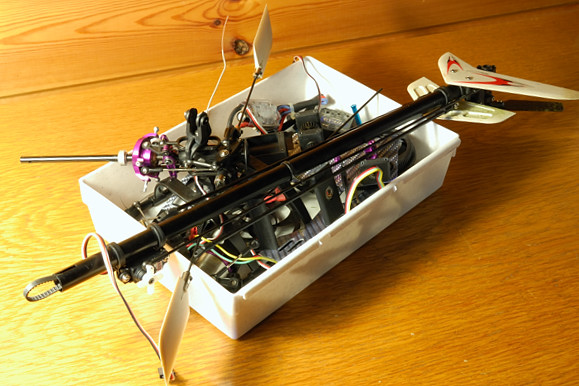
Avant ça c'était un bel appareil avec un châssis carbone et quelques pièces
en aluminium éloxé. Nous le verrons plus tard lorsqu'il sera réparé...
Pour le remettre en état et le régler il me faut compter trois soirées.
Cela m'a pris en réalité quatre heures pour le réparer, le régler et l'essayer.

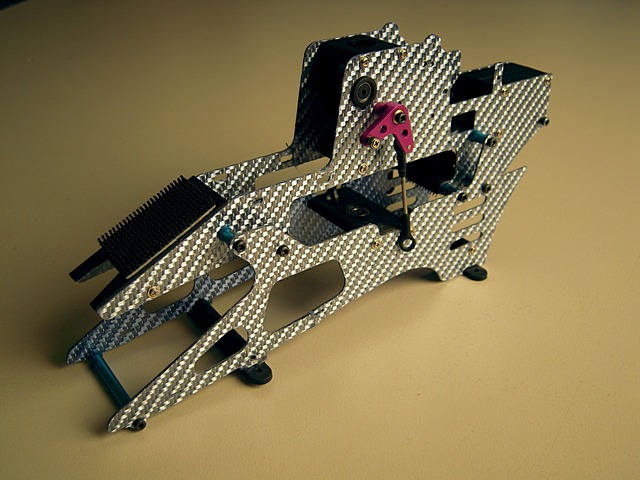
Voici mon Belt-CP en ordre de marche.
Couronne principale
La couronne principale est une des parties les plus fragiles de cet
hélicoptère.
Au moindre choc avec un ralentissement exagéré du rotor le moteur usine les
dents de cette couronne qui devra être remplacée.
On peut commander différentes pièces de remplacement mais si le roulement
unidirectionnel est en bon état autant le réutiliser.
Il suffit d'acheter le kit simple (EK1-0539) comprenant la couronne principale
et celle de l'anti couple.
Il faut des lors transférer le roulement de l'ancienne couronne dans la
nouvelle.
La manipulation ne requiert que quelques minutes.
Voici la vidéo : Transfert du roulement de couronne principale.
Châssis carbone
Les nombreux crash ont fini pas détruire le châssis en plastique.
C'est l'occasion de mettre un châssis carbone (EK1-0554). Celui-ci est livré en kit à
monter avec toutes les pièces aluminium anodisées.
Le châssis en plastique pèse 60 gr., en carbone il pèse 80gr. Le carbone est
très léger mais pas les pièces alu et la visserie nécessaire pour son montage.
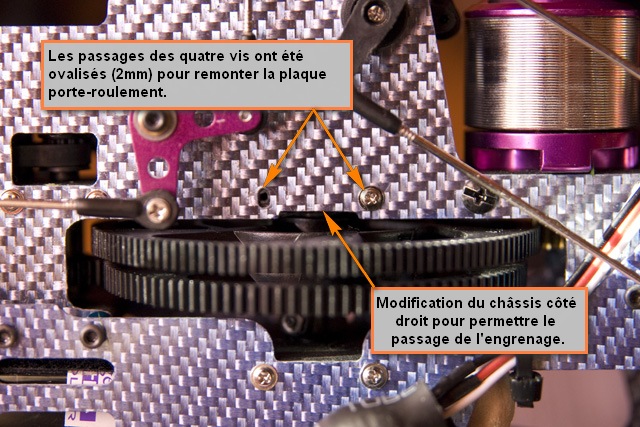
Il y a un problème de conception: l'espace requis pour passer l'engrenage principal est trop serré -de environ 1mm-. J'ai légèrement limé le châssis -très tendre- et ovalisé les passages de vis.
Voici le travail:
La mise en œuvre du châssis n'a pas posé de problème. Il fallait évidemment régler à nouveau l'ensemble des pièces en mouvement.
Servos
Les servos d'origine (EK2-0500) ont la fâcheuse tendance à se casser au
moindre choc. Bien que la réparation soit facile et les pièces de rechange
disponibles il est rageant de devoir prévoir à chaque fois une réparation de ce
type. Il existe quelques modèles de servos de remplacement.
De plus les EK2-0500 ont deux défauts: un centrage moyen qui ne leur permet pas
bien de revenir à leur position centrale et un temps de latence assez
dérangeant.
J'ai choisi des Hitec HS-55 que j'espère meilleurs. L'échange ne pose pas de
problème mécanique. Le servo arrière droit est un peu plus difficile à placer
mais cela est du au châssis carbone dont la forme n'est pas optimale.
Ces servos tournent à l'envers des originaux mais l'inversement du sens se fait
en quelques clics sur la radio.
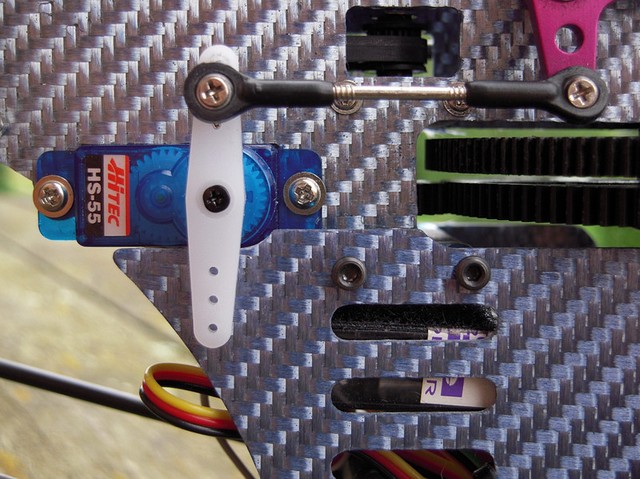
Le palonnier est dans le deuxième trou permettant une incidence de ± 10° ce qui
me satisfait. J'ai essayé avec le trou extérieur mais la valeur obtenue de ± 15°
est excessive même si je peux la corriger en partie sur la radio programmable.

Le sens des servos est inversé par rapport à ceux d'origine.
Premières boucles
31 mai 2008.
J'ai accroché la caméra FlycamOne sous l'hélicoptère pour mémoriser ce vol.
Après avoir effectué quelques boucles auparavant et beaucoup plus sur le simulateur j'ai
installé aujourd'hui la caméra FlyCamOne sous l'hélicoptère pour mémoriser cet
instant.
Des vibrations sont visibles mais l'essentiel y est...
Voici la vidéo: les premières boucles
en Belt-CP

8 juin 2008.
J'ai perdu le contrôle de l'hélico alors que je faisais du circuit et n'ai
pas réussi à le maîtriser. Il a atterrit dans le blé pour m'en faire perdre
beaucoup.
La vitesse n'était pas particulièrement importante et je pensais le retrouver en
bon état en tous cas à première vue lorsque je l'ai sorti du champ...
Mais le châssis carbone a, contre toute attente morflé au point qu'il ne reste peut-être qu'un flan utilisable !
Il est beau comme ça, de loin.
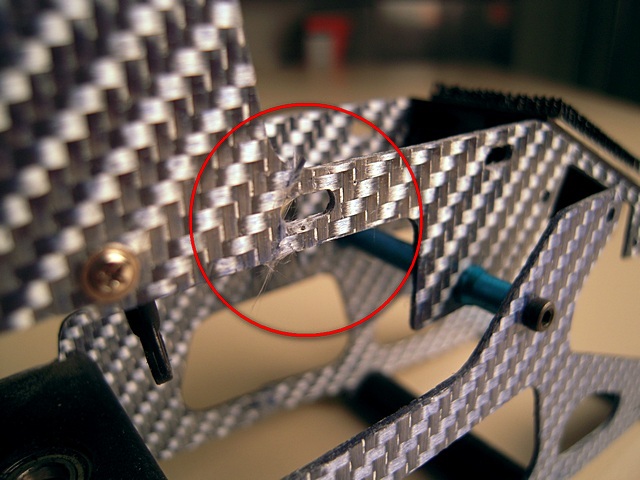
Pas de chance, le châssis s'est plié verticalement au niveau des vis arrière de
la fixation moteur.

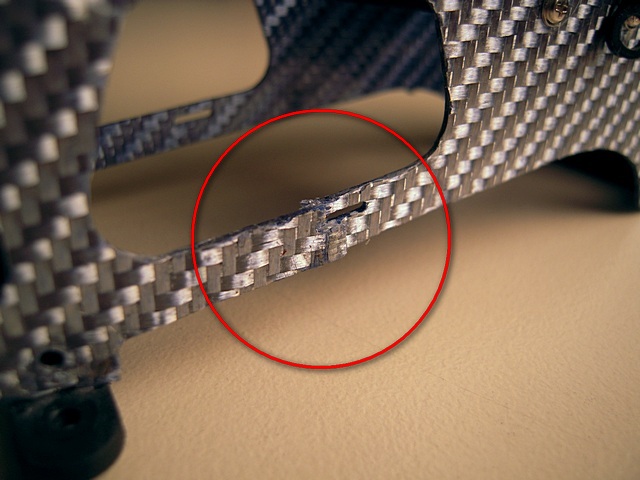
La partie basse s'est rompue.
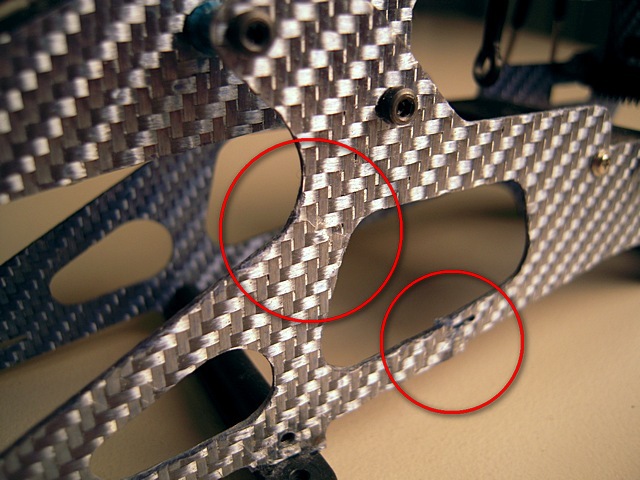
D'autres points de rupture sont visibles.
En conclusion: bien que le carbone soit très attrayant, le châssis en plastique est plus robuste et coûte le quart du prix. Un choix important pour un débutant.
20.06.2008
J'ai remis un châssis plastique qui est moins beau mais cela ne se ressent
pas au pilotage.
Cela ne m'a pas empêché de rater une manœuvre et de descendre à pleine vitesse
sur une surface dure
. Bilan: les pales carbone pulvérisées, la barre de Bell, les axes du rotor
principal, de l'AC (anti-couple) et des porte-pales , la bulle.
J'ai pu le remonter grâce aux nombreuses pièces en stock. J'ai remis des pales
en bois en attendant celles en carbone.
Je continue mon entraînement de boucles, rouleaux, pirouettes et autres en
essayant d'enjoliver l'ensemble pour que cela devienne présentable.
23.06.2008
Encore un crash !
J'avais changé la programmation de la radio et le mode IdleUp1 n'avait pas
assez de vitesse rotor. J'ai perdu le contrôle lors de manœuvres et il a piqué à
pleine vitesse sur le sol dur.
Les dégâts sont importants dont deux servos HS55 qui sont HS
J'ai remonté l'ensemble avec des servos Esky d'origine. Si c'est pour les casser
autant en réduire les frais...
01.12.2008
J'ai vendu tout mon matériel du Belt-CP, complètement dégouté.
1er mars 2010
Le virus m'a repris. J'ai racheté un Belt-CP d'occasion, une télécommande Futaba T7C et
quelques pièces de rechange. Avec les pièces qu'il me restaient j'ai tout ce
qu'il faut pour recommencer.
J'ai tout à réapprendre car j'appréhende le CP.
2 février 2012
J'ai acheté un Trex 500. Du coup j'utilise moins le 450.
J'ai remarqué une
énorme différence de comportement du 500, beaucoup plus serein. Il est d'une
incroyable stabilité due d'une part grâce à ses dimensions généreuses avec près
d'un mètre
de rotor et plus du double de poids, et d'autre part une meilleure qualité de
fabrication.